













ニューエラー NewEra ワイド型平行移動型ハンドHP08シリーズ シリンダ内径 20mm HP0820 1個
スベリ機構の高把持力ハンドです。ダブルピストン方式により高把持力です。ロングポイントでのグリップが可能です。貫通取付け穴を採用し取付性を向上しています。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。ダブルピストン方式により高把持力です。ロングポイントでのグリップが可能です。貫通取付け穴を採用し取付性を向上しています。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra ワイド型平行移動型ハンドHP08シリーズ シリンダ内径 25mm HP0825 1個
スベリ機構の高把持力ハンドです。ダブルピストン方式により高把持力です。ロングポイントでのグリップが可能です。貫通取付け穴を採用し取付性を向上しています。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。ダブルピストン方式により高把持力です。ロングポイントでのグリップが可能です。貫通取付け穴を採用し取付性を向上しています。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra ワイド型平行移動型ハンドHP08シリーズ シリンダ内径 16mm HP0816 1個
スベリ機構の高把持力ハンドです。ダブルピストン方式により高把持力です。ロングポイントでのグリップが可能です。貫通取付け穴を採用し取付性を向上しています。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。ダブルピストン方式により高把持力です。ロングポイントでのグリップが可能です。貫通取付け穴を採用し取付性を向上しています。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra 着脱式平行移動型リニアハンド ロングストロークタイプ HP04DL10C 1個
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra 平行移動型三爪ハンドHP15シリーズ シリンダ内径 16mm HP1516C 1個
高精度高剛性ハンドです。3爪ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。中空穴を利用したしたハンドリングが可能です。ロボットハンド用に。円形ワークの把持に。
高精度高剛性ハンドです。3爪ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。中空穴を利用したしたハンドリングが可能です。ロボットハンド用に。円形ワークの把持に。+もっと見る

ニューエラー NewEra 平行移動型三爪ハンドHP15シリーズ シリンダ内径 25mm HP1525C 1個
高精度高剛性ハンドです。3爪ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。中空穴を利用したしたハンドリングが可能です。ロボットハンド用に。円形ワークの把持に。
高精度高剛性ハンドです。3爪ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。中空穴を利用したしたハンドリングが可能です。ロボットハンド用に。円形ワークの把持に。+もっと見る

ニューエラー NewEra 平行移動型三爪ハンドHP15シリーズ シリンダ内径 20mm HP1520C 1個
高精度高剛性ハンドです。3爪ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。中空穴を利用したしたハンドリングが可能です。ロボットハンド用に。円形ワークの把持に。
高精度高剛性ハンドです。3爪ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。中空穴を利用したしたハンドリングが可能です。ロボットハンド用に。円形ワークの把持に。+もっと見る

ニューエラー NewEra タイミングハンドΦ12+Φ16JA:開方向調整付 HP07TR12JA 1個
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 20mm 複動形 EHPE20C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 10mm 複動形 EHPE10C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 16mm 複動形 EHPE16C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 25mm 複動形 EHPE25C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra タイミングハンドΦ8+Φ12JA:開方向調整機構付 HP07TR8JA 1個
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。+もっと見る

ニューエラー NewEra タイミングハンドΦ8+Φ12JB:閉方向調整機構付 HP07TR8JB 1個
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。+もっと見る

ニューエラー NewEra 薄型平行移動型ハンドHP07シリーズ Φ12 JB:閉方向調整機構 HP0712JB 1個
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 16mm 常時開単動形 EHPE16A 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 10mm 常時開単動形 EHPE10A 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。+もっと見る

ニューエラー NewEra 薄型平行移動型ハンドHP07シリーズ Φ8 JA:開方向調整機構 HP078JA 1個
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 25mm 常時開単動形 EHPE25A 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 20mm 常時開単動形 EHPE20A 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。常時開単動形ハンドです。ロボットハンド用に。+もっと見る

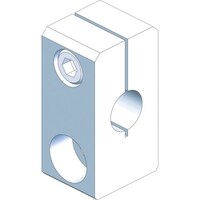
スター精機アインツ事業部 アインツ アタッチBKT・φ8・M
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。+もっと見る

スター精機アインツ事業部 アインツ アタッチBKT・φ8・M
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。+もっと見る
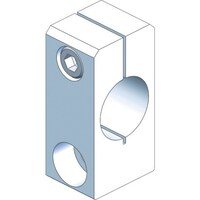
スター精機アインツ事業部 アインツ アタッチBKT・φ12・M6
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。+もっと見る
スター精機アインツ事業部 アインツ アタッチBKT・φ12・M5
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。+もっと見る
スター精機アインツ事業部 アインツ アタッチBKT・φ20・M6
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。+もっと見る
スター精機アインツ事業部 アインツ アタッチBKT・φ12・M8
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。+もっと見る
スター精機アインツ事業部 アインツ アタッチBKT・φ20・M8
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。
SUSパイプを利用したロボットハンドを、ロボットに取付するボルトサイズに合わせたブラケットです。+もっと見る
日東工器 分岐アダプタ PCD25 EVEBA25/82072 1個
電動吸着ハンド EVE500の別売品です。分岐アダプタはコンバム社ロボットハンドキット FH・FE・FX・FI タイプに接続するアダプタとなります。
電動吸着ハンド EVE500の別売品です。分岐アダプタはコンバム社ロボットハンドキット FH・FE・FX・FI タイプに接続するアダプタとなります。+もっと見る

日東工器 分岐アダプタ PCD31.5 EVEBA31.5/82074 1個
電動吸着ハンド EVE500の別売品です。分岐アダプタはコンバム社ロボットハンドキット FH・FE・FX・FI タイプに接続するアダプタとなります。
電動吸着ハンド EVE500の別売品です。分岐アダプタはコンバム社ロボットハンドキット FH・FE・FX・FI タイプに接続するアダプタとなります。+もっと見る

日東工器 分岐アダプタ PCD50 EVEBA50/82075 1個
電動吸着ハンド EVE500の別売品です。分岐アダプタはコンバム社ロボットハンドキット FH・FE・FX・FI タイプに接続するアダプタとなります。
電動吸着ハンド EVE500の別売品です。分岐アダプタはコンバム社ロボットハンドキット FH・FE・FX・FI タイプに接続するアダプタとなります。+もっと見る





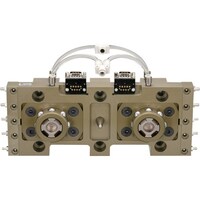
スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。+もっと見る
スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ツール側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側 OXWLB30 1個
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーチェッキ弁内蔵です。(ロボット側)エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ コネクター・SSW用
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。+もっと見る

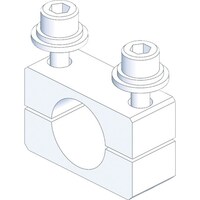
スター精機アインツ事業部 アインツ スライドBKT・W・φ20
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。+もっと見る
スター精機アインツ事業部 アインツ スライドBKT・φ20
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。+もっと見る
スター精機アインツ事業部 アインツ スライドBKT・W・φ12
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。+もっと見る
スター精機アインツ事業部 アインツ スライド40BKT・W・M12
SUSパイプを利用し組付する事で、自在にロボットハンドが製作できます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作できます。+もっと見る

スター精機アインツ事業部 アインツ スライドBKT・φ12
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。+もっと見る

スター精機アインツ事業部 アインツ スライドBKT・φ8
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。+もっと見る

日東工器 ケーブル M8 メスーオス EVECAM8FM/81953 1本
電動吸着ハンド EVE500の別売品です。ロボット通信ケーブルロボット本体側のコネクタピン接続形態をご確認ください。お持ちでない方は、別途ご購入ください。画像は代表画像を使用しています。
電動吸着ハンド EVE500の別売品です。ロボット通信ケーブルロボット本体側のコネクタピン接続形態をご確認ください。お持ちでない方は、別途ご購入ください。画像は代表画像を使用しています。+もっと見る

日東工器 ケーブル M8 メスーメス EVECAM8FF/81950 1本
電動吸着ハンド EVE500の別売品です。ロボット通信ケーブルロボット本体側のコネクタピン接続形態をご確認ください。お持ちでない方は、別途ご購入ください。画像は代表画像を使用しています。
電動吸着ハンド EVE500の別売品です。ロボット通信ケーブルロボット本体側のコネクタピン接続形態をご確認ください。お持ちでない方は、別途ご購入ください。画像は代表画像を使用しています。+もっと見る