














ニューエラー NewEra 平行移動リニアハンド フィンガ長爪タイプ HP04FR8C 1個
平行移動リニアハンド フィンガ長爪タイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
平行移動リニアハンド フィンガ長爪タイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

アズワン ロッドエンド 無給油式 メネジ8mm (2個入) CHSL8
ボールのレース面に自己潤滑性に優れた合成樹脂を接着している無給油タイプです。各種搬送機械部品。各種工作機械部品。FA機器。包装機械部品。繊維機械部品。農機具機械部品。ロボット部品。
ボールのレース面に自己潤滑性に優れた合成樹脂を接着している無給油タイプです。各種搬送機械部品。各種工作機械部品。FA機器。包装機械部品。繊維機械部品。農機具機械部品。ロボット部品。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ツール側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ツール側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ツール側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ツール側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ 自在チャック(門型)
ワーク形状に合せ吸着金具を自在に移動可能です。ハンド取付部は他社製ロボットにも取付可能なユニバーサル仕様です。
ワーク形状に合せ吸着金具を自在に移動可能です。ハンド取付部は他社製ロボットにも取付可能なユニバーサル仕様です。+もっと見る

スター精機アインツ事業部 アインツ 自在チャック(ミニ)
ワーク形状に合せ吸着金具を自在に移動可能です。ハンド取付部は他社製ロボットにも取付可能なユニバーサル仕様です。
ワーク形状に合せ吸着金具を自在に移動可能です。ハンド取付部は他社製ロボットにも取付可能なユニバーサル仕様です。+もっと見る

スター精機アインツ事業部 アインツ 自在チャック(H型)
ワーク形状に合せ吸着金具を自在に移動可能です。ハンド取付部は他社製ロボットにも取付可能なユニバーサル仕様です。
ワーク形状に合せ吸着金具を自在に移動可能です。ハンド取付部は他社製ロボットにも取付可能なユニバーサル仕様です。+もっと見る
スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ツール側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ツール側
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。
独自の離脱機構搭載です。(特許第4126074号)フェールセーフ機構内蔵です。ロボットハンドを短時間で簡単に交換できます。エアーオプションの追加が可能です。+もっと見る

ニューエラー NewEra 着脱式平行移動型リニアハンド ロングストロークタイプ HP04DL10C 1個
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra 着脱式平行移動リニアハンド ロングストロークタイプ HP04DL16C 1個
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra 着脱式平行移動リニアハンド ロングストロークタイプ HP04DL20C 1個
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
着脱式平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra 着脱式平行移動リニアハンド スタンダードタイプ HP04DR16C 1個
着脱式平行移動リニアハンド スタンダードタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
着脱式平行移動リニアハンド スタンダードタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra 着脱式平行移動リニアハンド スタンダードタイプ HP04DR20C 1個
着脱式平行移動リニアハンド スタンダードタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
着脱式平行移動リニアハンド スタンダードタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra スライドハンド 平行移動リニアハンド ロングストロークタイプ HP04L10C 1個
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra スライドハンド 平行移動リニアハンド ロングストロークタイプ HP04L16C 1個
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra スライドハンド 平行移動リニアハンド ロングストロークタイプ HP04L20C 1個
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

ニューエラー NewEra スライドハンド 平行移動リニアハンド ロングストロークタイプ HP04L8C 1個
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。
平行移動リニアハンド ロングストロークタイプです。自働機のハンドリングプロツールに。ロボット用ハンドに。+もっと見る

日本ベアリング NB ボールスプライン用ナットSPR13 SPR13 1個
ロータリーボールスプラインは直線運動と回転運動を同時に行える機構です。スカラ形ロボットや組立機の立軸、ローダーなどに使用されます。
ロータリーボールスプラインは直線運動と回転運動を同時に行える機構です。スカラ形ロボットや組立機の立軸、ローダーなどに使用されます。+もっと見る

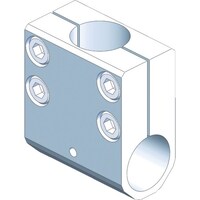
スター精機アインツ事業部 アインツ ティーコネクター#2・φ12φ12
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。+もっと見る
スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。+もっと見る

スター精機アインツ事業部 アインツ ツールチェンジャー・ロボット側
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。+もっと見る

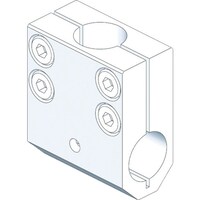
スター精機アインツ事業部 アインツ ティーコネクター#1・φ12φ12
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。+もっと見る

スター精機アインツ事業部 アインツ ティーコネクター#2・φ20φ20
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。+もっと見る
スター精機アインツ事業部 アインツ ティーコネクター#2・φ8φ
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。
SUSパイプを利用し組付する事で、自在にロボットハンドが製作出来ます。T型構造の為、厚みを抑える事が出来ます。+もっと見る

近藤科学 サーボモーター KRS3204R2 ICS 03211 03211 1個
標準タイプデザインの小型サーボモーター近藤科学製のロボット用のサーボモーターです。コアレスモータを採用し、ミニサーボではトップクラスの最大トルク9.3kgf・cm(7.4V時)を出力します。
標準タイプデザインの小型サーボモーター近藤科学製のロボット用のサーボモーターです。コアレスモータを採用し、ミニサーボではトップクラスの最大トルク9.3kgf・cm(7.4V時)を出力します。+もっと見る

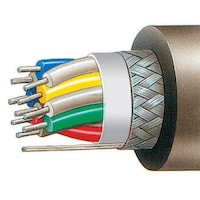
富士電線工業 計装用ケーブル 10m巻 FKEVSB 0.5 SQX10P FKEVSB 0.5 SQX10P 1巻
端末機器、計測機器、OA機器、通信機器、産業ロボット、その他あらゆる電子・電気機器の内部配線、機器間相互の接続に使用できます。
端末機器、計測機器、OA機器、通信機器、産業ロボット、その他あらゆる電子・電気機器の内部配線、機器間相互の接続に使用できます。+もっと見る
スター精機アインツ事業部 アインツ 多関節用ツールチェンジャー・ロボット側
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。
ロボットハンドを短時間で簡単に交換できます。独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。+もっと見る

スター精機アインツ事業部 アインツ チャックワンタッチ・ステンレス・ロボ
1本のネジを締めるだけでハンドが交換完了します。チャックワンタッチ(OASSISUS)に接合するロボット側ワンタッチ金具。本体がステンレス(SUS)のため、食品、医療分野にも対応できます。
1本のネジを締めるだけでハンドが交換完了します。チャックワンタッチ(OASSISUS)に接合するロボット側ワンタッチ金具。本体がステンレス(SUS)のため、食品、医療分野にも対応できます。+もっと見る

CKD CKD 電動アクチュエータ グリッパ2フィンガタイプ FFLD0850NCN30LKSR00 1個
ロボット先端に最適なロングストローク&薄型タイプの電動グリッパです。コントローラはアクチュエータに内蔵されており制御盤の省スペース化が可能です。多品種ワークのハンドリングに。
ロボット先端に最適なロングストローク&薄型タイプの電動グリッパです。コントローラはアクチュエータに内蔵されており制御盤の省スペース化が可能です。多品種ワークのハンドリングに。+もっと見る

QIコネクタ03P 誤挿入防止キー付QIプラグハウジング03P 20個入 QI3KAD QI3KAD20P 1袋
誤挿入防止キー付きQI(2550)コネクタのプラグハウジング。極数:3。ロボット用サーボモータの延長用コードなどに適しています。
誤挿入防止キー付きQI(2550)コネクタのプラグハウジング。極数:3。ロボット用サーボモータの延長用コードなどに適しています。+もっと見る

スター精機アインツ事業部 アインツ 多関節用ツールチェンジャー・ツール側
独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。小型・中型ロボット対応のツールチェンジャーです。エアーオプションの追加が可能です。
独自の離脱機構を搭載しています。(特許第4126074号)フェールセーフ機構内蔵です。エアーチェッキ弁内蔵です。小型・中型ロボット対応のツールチェンジャーです。エアーオプションの追加が可能です。+もっと見る

ニューエラー NewEra タイミングハンドΦ12+Φ16JA:閉方向調整付
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。+もっと見る

ABB PMA 摩耗表示機能付き多層コルゲートチューブ NW23サイズ 50m XTPCG23BB.50 1巻(50M)
耐摩耗性を有し、摩耗状況を表示する機能を備えたフレキシブルコンジットチューブです。市場で最も広く使用されている協働ロボットのケーブル保護用途に最適です。
耐摩耗性を有し、摩耗状況を表示する機能を備えたフレキシブルコンジットチューブです。市場で最も広く使用されている協働ロボットのケーブル保護用途に最適です。+もっと見る

ABB PMA 摩耗表示機能付き多層コルゲートチューブ NW17サイズ 50m XTPCG17BB.50 1巻(50M)
耐摩耗性を有し、摩耗状況を表示する機能を備えたフレキシブルコンジットチューブです。市場で最も広く使用されている協働ロボットのケーブル保護用途に最適です。
耐摩耗性を有し、摩耗状況を表示する機能を備えたフレキシブルコンジットチューブです。市場で最も広く使用されている協働ロボットのケーブル保護用途に最適です。+もっと見る

ABB PMA 摩耗表示機能付き多層コルゲートチューブ NW29サイズ 50m XTPCG29BB.50 1巻(50M)
耐摩耗性を有し、摩耗状況を表示する機能を備えたフレキシブルコンジットチューブです。市場で最も広く使用されている協働ロボットのケーブル保護用途に最適です。
耐摩耗性を有し、摩耗状況を表示する機能を備えたフレキシブルコンジットチューブです。市場で最も広く使用されている協働ロボットのケーブル保護用途に最適です。+もっと見る

CKD CKD 電動アクチュエータ グリッパ2フィンガタイプ FFLD3070NCN30LKSR00 1個
ロボット先端に最適なロングストローク&薄型タイプの電動グリッパです。電動グリッパですが、高把持力:300N(片側)です。把持位置を任意に設定可能なため、幅広いサイズの多品種ワークに対応可能です。
ロボット先端に最適なロングストローク&薄型タイプの電動グリッパです。電動グリッパですが、高把持力:300N(片側)です。把持位置を任意に設定可能なため、幅広いサイズの多品種ワークに対応可能です。+もっと見る

CKD CKD 電動アクチュエータ グリッパ2フィンガタイプ FFLD5080NCN30LKSR00 1個
ロボット先端に最適なロングストローク&薄型タイプの電動グリッパです。電動グリッパですが、高把持力:500N(片側)です。把持位置を任意に設定可能なため、幅広いサイズの多品種ワークに対応可能です。
ロボット先端に最適なロングストローク&薄型タイプの電動グリッパです。電動グリッパですが、高把持力:500N(片側)です。把持位置を任意に設定可能なため、幅広いサイズの多品種ワークに対応可能です。+もっと見る

ニューエラー NewEra タイミングハンドΦ12+Φ16JA:開方向調整付 HP07TR12JA 1個
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。+もっと見る

ニューエラー NewEra 薄型平行移動型ハンドHP07シリーズ Φ12 JA:開方向調整機構
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。+もっと見る

ニューエラー NewEra 薄型平行移動型ハンドHP07シリーズ Φ8 JB:閉方向調整機構
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。
高精度ハンドです。薄型ハンドです。調整レバーの停止位置調整ができます。耐荷重耐モーメントに優れています。調整レバーがワーク大きさに関わらず一定位置に停止します。ロボットハンド用に。+もっと見る

ニューエラー NewEra タイミングハンドΦ8+Φ12JA:開方向調整機構付 HP07TR8JA 1個
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。+もっと見る

ニューエラー NewEra タイミングハンドΦ8+Φ12JB:閉方向調整機構付 HP07TR8JB 1個
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。
位置決めレバーと把持レバーに時間差を付けて動作します。異形ピストンによる端面位置決めが可能です。レバー開閉のタイミング調整が容易にできます。ロボットハンド用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 20mm 複動形 EHPE20C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 10mm 複動形 EHPE10C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 16mm 複動形 EHPE16C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る

ニューエラー NewEra 平行移動型ハンドEHPEシリーズ シリンダ内径 25mm 複動形 EHPE25C 1個
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。
スベリ機構の高把持力ハンドです。耐荷重耐モーメントに優れています。ロングポイントでのグリップが可能です。3方向からの取付けが可能です。ロボットハンド用に。自動機のハンドツール用に。+もっと見る
